当自动驾驶的潮水汹涌而来,高级驾驶辅助系统(ADAS)已渐趋成熟,然而要让自动驾驶真正走进现实生活中,汽车制造商还需要将自动驾驶等级从当前汽车工程学会(SAE)定义的L2+/3级提升至L5级。
特斯拉的FSD、小鹏汽车的XPILOT、蔚来汽车的NIOPilot等等自动驾驶系统的商用落地,自动驾驶汽车似乎呼之欲出。然而实际上,制造数辆在合理且有利的条件下运行的高级别自动驾驶车辆,与在复杂的开放环境下运行数百万辆车之间存在巨大鸿沟。
为提升自动驾驶等级,开发人员们正在攻克多项技术难关,除了各种新技术、新传感器被不断引入到汽车里面使功能丰富之外,还面临一个问题就是我们如何才能知道现在的车辆已经足够安全到可以上路了呢?
测试成为了自动驾驶车辆商业化落地的一项重要关卡。如何进行完备的测试,使得消费者能够有信心坐上自动驾驶车辆是关键。
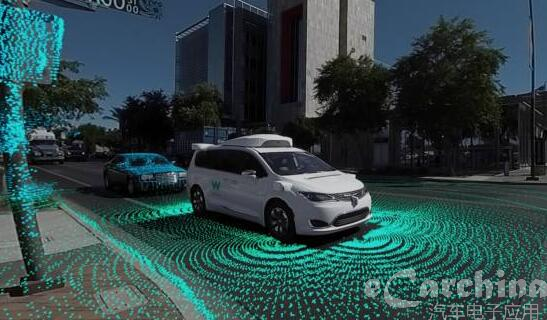
近期,谷歌母公司Alphabet旗下子公司Waymo对外公布其自动驾驶最新里程碑:模拟自动驾驶测试总里程已经达到100亿英里(约合160亿公里),而去年9月份这一数字为50亿英里(约合80亿公里)。
此外,Waymo也在积极开展自动驾驶实际道路测试,目前累计在实际道路上的测试里程已经超过1000万英里(约合1600万公里)。Waymo表示无论是实际道路测试里程,还是模拟器测试里程,都能够让自动驾驶系统变得更加成熟,并且提升其能力。
随着测试里程的积累,模拟器将变得更加精密和精准,这意味着模拟测试的结果也会变得更加可靠,能够为车辆在实际道路上的形式提供有力的支持。
由此可见,自动驾驶汽车商用化需经历的三个测试阶段:仿真测试、封闭场地测试以及开放道路测试。
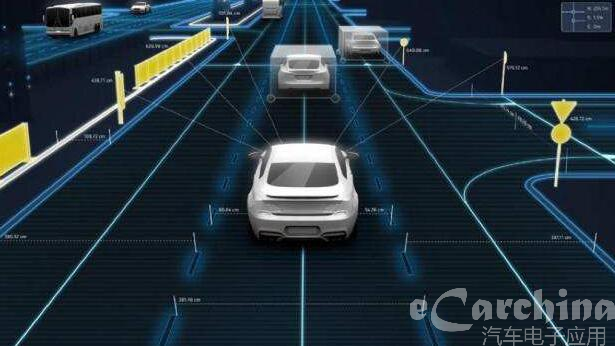
其中,自动驾驶仿真测试主要是以数学建模的方式将自动驾驶的应用场景进行数字化还原,建立尽可能接近真实世界的系统模型,无需实车直接通过软件进行仿真测试便可达到对自动驾驶系统及算法的测试验证目的。而虚拟仿真测试又是实现高级别自动驾驶落地应用的关键一环,具备自动驾驶功能的车辆必须经过大量的虚拟仿真测试以及实车路测之后才能商用化。
经过仿真测试阶段后,道路测试是自动驾驶技术落地的必经之路。去年以来,北京、上海、广州、深圳、长沙、沧州、长春等多地出台相关政策,开放自动驾驶常态化运营,并发布地方自动驾驶路测牌照,助力自动驾驶技术提速。
不过,在车辆道路测试的过程中,还有不少问题待解决。
根据美国兰德公司的一项研究,一套自动驾驶系统至少需要通过110亿英里(约合177亿公里)的驾驶数据来进行系统和算法的测试验证才能达到量产的条件。因此单纯依靠实车路测极难完成这一目标,并且实车路测还存在道路测试周期长、成本高、效率低;覆盖的场景工况有限, “corner case”难以复现;危险场景中的道路测试安全性无法保障等等问题。
仿真测试所具备的优势可以解决上述难题。
仿真测试一般包括模型在环仿真(MIL)、软件在环仿真(SIL、硬件在环仿真(HIL)、整车在环仿真(VIL)几种类型。该测试场景配置灵活,场景覆盖率高,同时测试过程安全,且对于一些“corner case”能够进行复现再测试,并且可实现自动测试和云端加速仿真测试,有利于提升测试效率和降低测试成本。
仿真测试、封闭场地测试以及开放道路测试三个测试阶段各自有难题,各自有优势,所以,仿真测试、封闭场地测试、开放道路测试三者之间可看成是一种互相补充的关系,形成测试闭环以促进自动驾驶车辆的研发和标准体系建立。
首先,仿真测试结果可以在封闭场地和开放道路中得到测试验证;其次,通过道路测试得出的危险场景,将会反馈到仿真测试中,就有针对性地去调整、设定场景和参数空间;第三,仿真测试和封闭场地测试的最终结果要进行综合评价,基于评价结果不断地去完善评价准则和测试场景库。

这也是为什么现在业内做ADAS及自动驾驶的一些公司普遍采用多种方式进行测试,是德科技汽车电子与能源事业部大中华区业务拓展经理祝晓悦对本汽车电子应用网表示,首先是基于软件仿真的方式去做大量的场景模拟,在软件仿真中,很多传感器的数据其实是依赖于软件里面直接输出的数据,算法获得这些传感器的真值/理想数据之后,再进行相应的算法功能的运作,得到判决以及预测。“这个方式好处和坏处非常明显的,好处是测试效率非常高,包括车辆的动力学模型、传感器所有数据都是虚拟的,可以直接给到算法模块里面进行非常高效的迭代。缺点是里面几乎所有部分,除了算法之外的都是虚拟的,很难代表一个真实世界的情况。算法在前期迭代时,去做这样一个大量的软件仿真能够非常有效地帮助算法快速进步。”
当中后期算法相对完善了,就需要引入更多真实世界的条件,包括把真实的传感器回波信号给放进来,甚至把真实的车辆动力学模型放进来仿真中。
在软件仿真之后就是进行相应的道路测试,祝晓悦同时指出,现在很多测试不是在开放道路上,而是在一些封闭的测试场里进行测试,去模拟、构建场景,让汽车在相对真实驾驶的环境下进行测试。“这种测试方法肯定是最接近于未来自动驾驶的实际情况的,虽然还不是在开放道路上,但封闭场里面也可以构建相应的场景。但封闭测试的缺点也比较明显,包括测试效率、测试成本都不是非常理想,另外,对于一些相对比较危险的场景,在实际道路场景的测试里是非常难以构建的,因为这涉及到很多人身安全。”
既然两种测试方式都有各自的局限性,且ADAS及自动驾驶的功能越来越先进、越复杂,为解决两种测试方式间的差距,业内专家就提出了在软件测试的部分加入更多真实的元素,只要有合适的工具能足够精确地模拟实际道路场景就可以了。
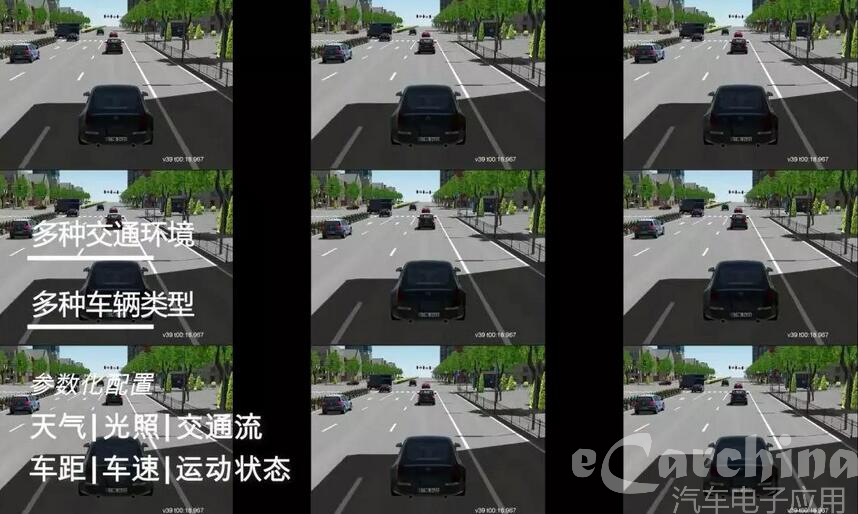
目前,基于场景库的仿真测试是解决自动驾驶路测问题的重要路线。场景库是自动驾驶仿真测试的基础,场景库对现实世界的覆盖率越高,那么仿真测试的结果越真实,而且自动驾驶汽车研发的不同阶段对于场景库的要求也不同,需要场景库实现不同的测试功能。
在自动驾驶的开发流程中,纯模型仿真—软件在环仿真—半实物仿真—封闭场地道路测试—开放道路测试的开发流程是最经济、高效的开发流程。
基于场景的仿真测试,是未来自动驾驶汽车测试的一个发展趋势,也是有效的途径,希望不同厂商间能采用统一数据格式标准,建立自动驾驶汽车仿真测试的标准体系,共建基础场景库,形成通用的、可移植的场景库,不断完善在自动驾驶车辆测试评价的方法体系。


.jpg)

